Mandakini EVO is the second ship of Bengawan UV Roboboat team that made for the International Roboboat Competition, this ship is a development of the previous ship The Mandakini NEO. We developed the ship based on our previous research with small aspects ranging from Hull, Sensor Sytem, Navigation System and Propulsion System, because we believe a big change start from a small change.
Technical Design Report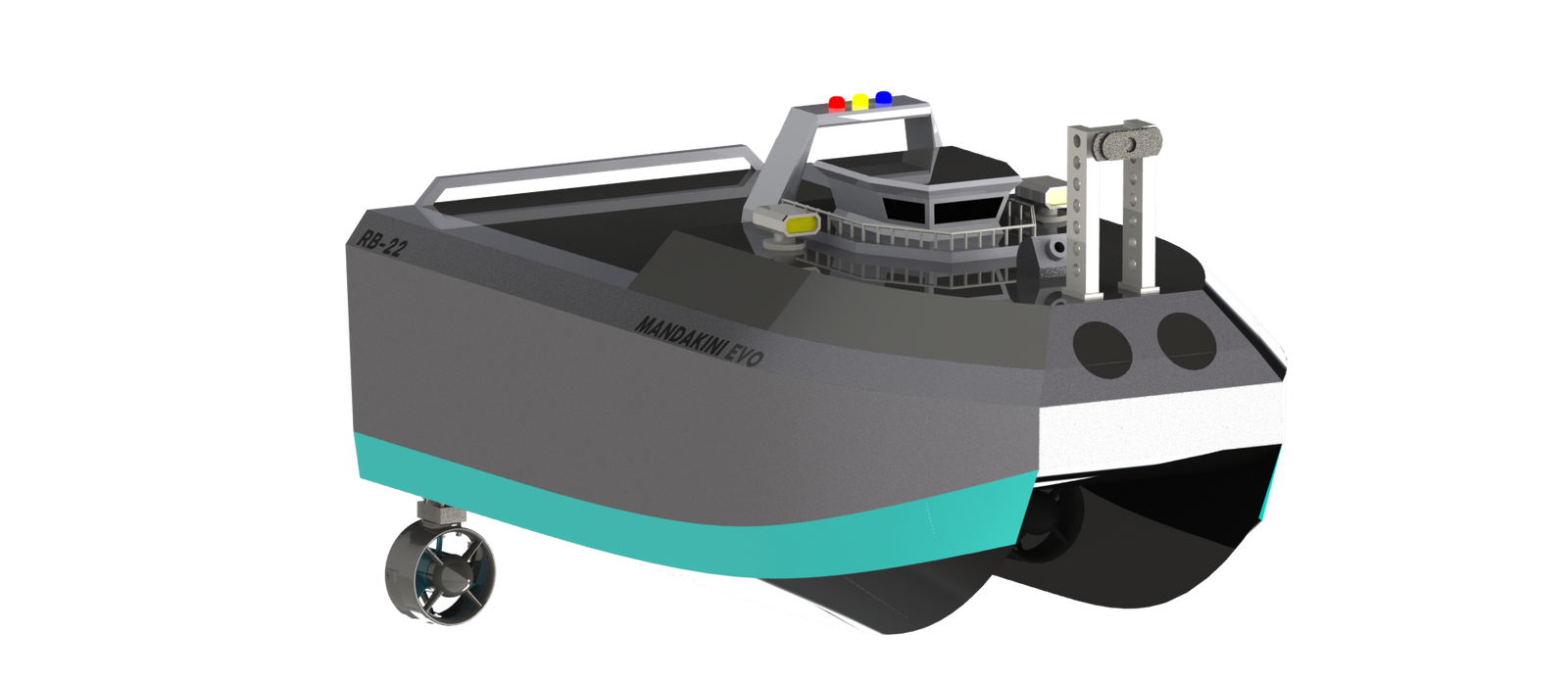
DETAIL OF HULL DESIGN
RoboBoat is an international student competition to design autonomous robotic boats. The robotic boat navigates through the challenge course with impressive maritime maneuverability. This year is the second year for Bengawan UV Roboboat team to compete in the Roboboat competition.
For More Information
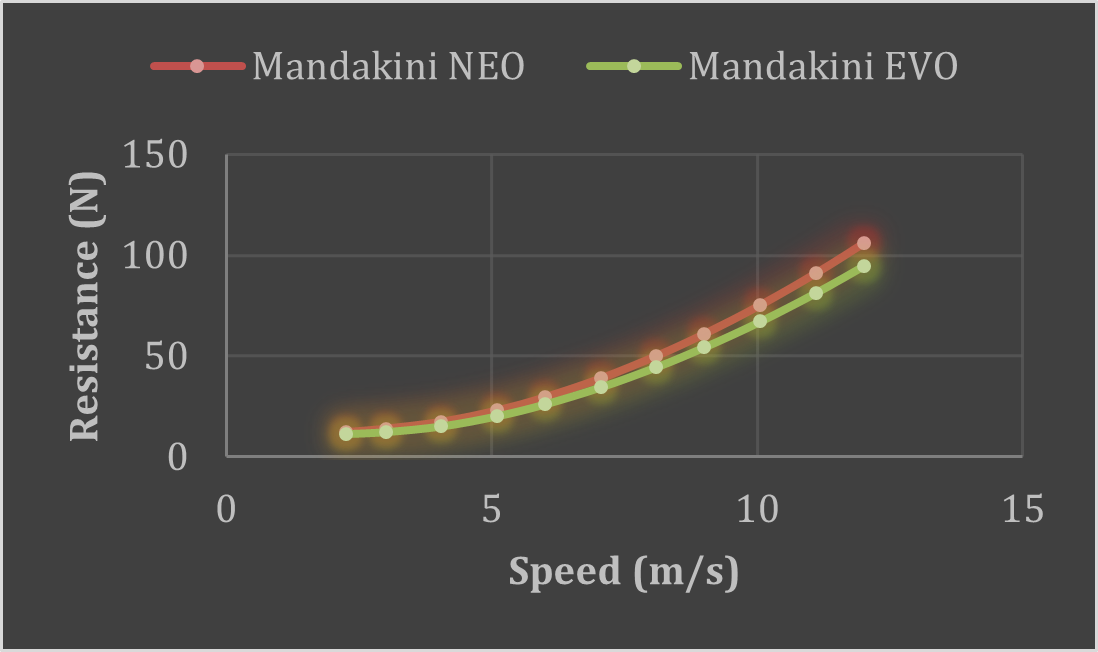
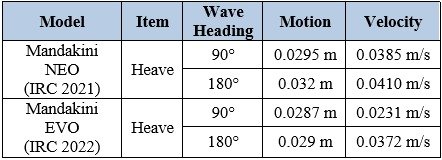
Mandakini EVO which is a developed version of Mandakini NEO. There was an 11% decrease in resistance. The maximum degree of the Mandakini EVO is 22.7° with the maximum GZ value is 0.017 m, while maximum degree of the Mandakini NEO is 21.8° with the maximum GZ value is 0.014 m. Those data are proof that our new ship has largest angle so that the ship will be safer and more stable for the on board electrical components. For the seakeping test, The
test was performed within the ship parameters of 4 m/s speed, 180°
(Head Seas) wave axis direction, and 0.02 m wave amplitude. The wave amplitude value and velocity of the Mandakini EVO were 0.0287 and
0.0231 m/s, respectively, whereas the Mandakini Neo exhibited values of 0.0295
m and 0.0385 m/s, respectively. The data show that the Mandakini EVO
experienced less vibration

To test the propulsion on this ship we've done thruster test and manueverbility test. The Thruster test was performed by setting both the thrusters to maximum thrust while the
ship was attached to a digital scale. From five tests, the maximum thrust of
the ship was demonstrated to be at 7.8 kg. While the manueverbility test was performed by circling a buoy while the motor was at 85% speed. From
five consecutive tests, the average results for the turning radius were 0.35 m
(clockwise) and 0.38 m (counterclockwise). These data are proof that the ship
would be able to complete an IRC 2022 mission requiring great agility for
maneuvering
The problem we had with propulsion was the bending of the servo wire (servo's connection with the thruster) at the time we performed the sharp maneuver. We overcome this by replacing servo wire with bicycle spoke that has good strength and flexibility.