DEVELOPMENT TIMELINE

historical records of build progress

The team conducted an evaluation and then conducted discussions and research to be able to develop things that still need to be developed from the previous year and prepare strategies to be able to implement IRC 2024 optimally. Based on the results of discussions and research, the team decided to use a symmetrical hull catamaran with the same modularity concept as last year but with a wider frame to make it easier for the team to carry the boat when moving it and more stable.


Furthermore, the boat design process was carried out. The team simulated stability and RAO on the hull and simulated static stress on the hull to get the best hull and hull. The simulation was performed using Maxsurf, Fusion360, and ANSYS software.

The hull manufacturing uses materials from fiberglass and gelcoat as the main coating. The manufacture of the hull is carried out with plywood material from the design that has been made and analyzed. Then the hull that has been arranged is coated with gelcoat until it becomes a mold and then coated again with gelcoat and fiberglass to make the hull. After the hull has been made, painting and arranging of the frame on the hull is carried out.


Our team actively engages in comprehensive documentation encompassing the construction of the robot, testing processes, and developmental stages. This documentation serves as crucial material for the Technical Design Report (TDR), the development of website content, and video footage capture. Additionally, meticulous scripting for the submitted video is undertaken. This approach is aimed at ensuring that every facet of the project, from conception to implementation, is meticulously documented, transparent, and adheres to international standards of professionalism. This meticulous process not only reflects the technical prowess of our robot but also demonstrates the team's commitment to conveying information clearly and professionally throughout all layers of the competition submission.
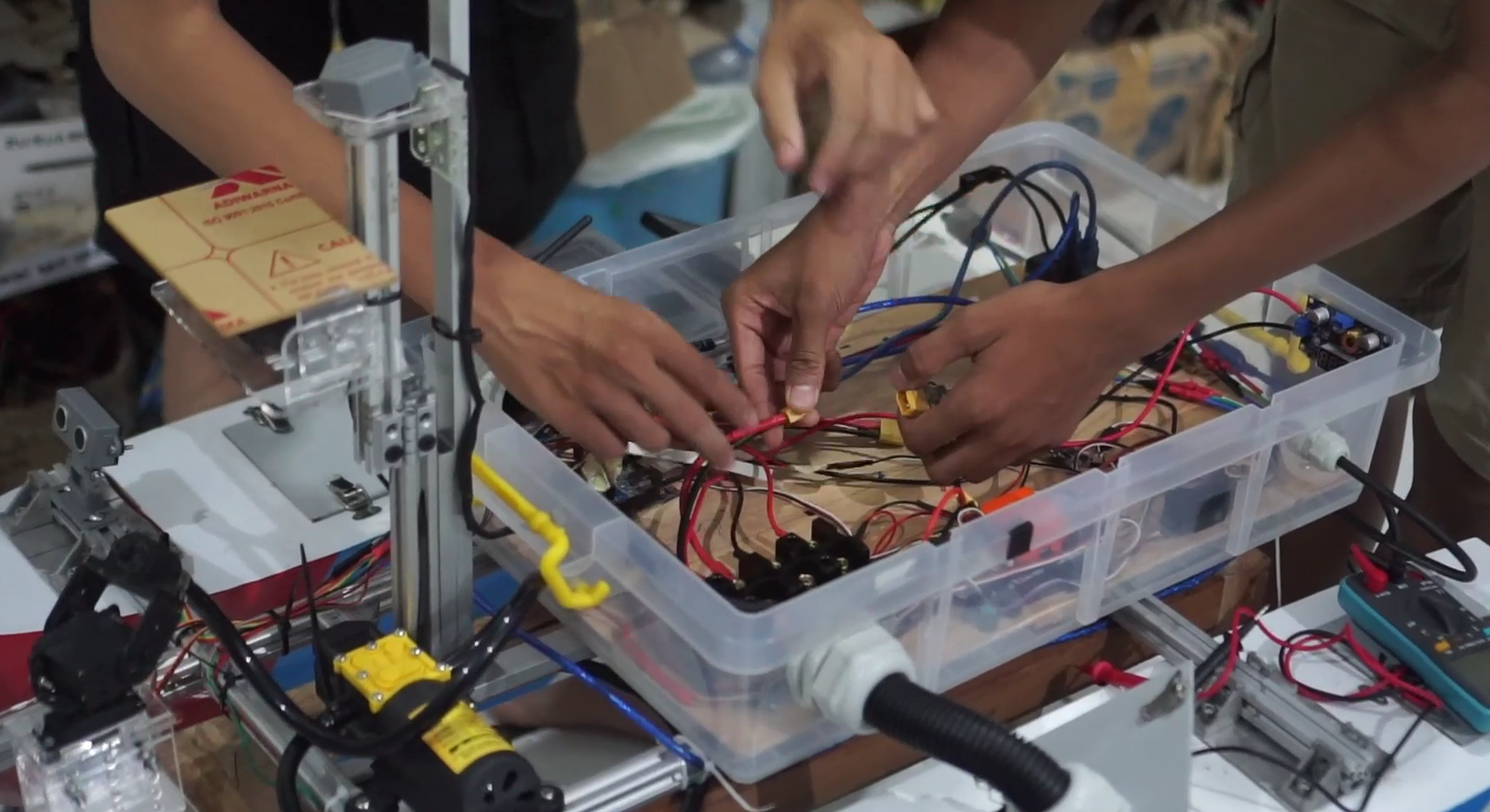

The team installed electronic components and propulsion systems on the boat. The placement of team components is arranged appropriately so that electronic components are safe and can work optimally. The team also placed the exhaust fan installation on the top of the boat so that air circulation in the box is maintained and protected from excessive heat.


After all the building process has been completed, further testing of the boat is carried out. The test carried out is a buoyancy test to determine the ability of the boat to float when receiving loads from components and propulsion. Then an impact test was also carried out on the boat's frame in holding the hull when subjected to dynamic loads


Our team conducts a thorough review and implements revisions to the submission prior to final submission. This process encompasses a meticulous examination of grammar, writing format, and rectification of any inaccuracies in the documentation. The focus lies on refining linguistic structures, adhering to precise formatting guidelines, and ensuring the accuracy of the presented documentation. This rigorous scrutiny aims to enhance the overall quality and professionalism of our submission



Upon the completion of testing, the team will proceed to conduct experiments with the boat to fulfill the missions outlined in the RoboBoat 2024 competition.
DEVELOPMENT PROGRESS
The evaluation from the previous year's competition served as a pivotal foundation for designing improvements and enhancements for the current year. In identifying the strengths and weaknesses of our boat, we aimed to ensure that the experiences from the previous competition provided profound insights to enhance the performance and reliability of our boat. From the evaluation results, it was revealed that the smaller size of the boat in the previous year posed limitations in various aspects, particularly concerning stability and resilience to adverse weather conditions, especially large waves. Therefore, in an effort to enhance the capabilities and endurance of the boat, we decided to enlarge the overall dimensions of the boat this year. However, we also considered the constraints of the maximum allowable dimensions for air travel to avoid incurring additional costs for excess baggage.
One significant aspect of change focused on the height of the hull. Recognizing that increasing the hull height would provide additional advantages in confronting large waves, this adjustment aimed to minimize the risk of water ingress. The heightened hull serves as a protective measure against potential inclement weather conditions that may arise during the competition.
Additionally, to safeguard the boat from potential damage due to water ingress, we opted to design the hull with an improved system, specifically by adding partition walls. These partitions are strategically designed to divide the interior of the hull into separate sections, so if one section is exposed to water, the other partitions can prevent water from entering other areas. This approach aims to enhance the safety and resilience of the boat against the potential risks of water ingress during the competition.
Not only emphasizing safety and resilience, these changes also present opportunities to enhance the overall functionality of the boat. With a larger boat size, we can allocate more space for necessary devices and systems, including increased battery capacity. This is expected to enhance the boat's performance and provide a competitive advantage in executing the assigned missions.
Furthermore, the Modified V Hull design on our boat combines traditional V elements with modifications to the bow and stern. The tapered bow reduces water resistance, enabling the boat to achieve high speeds with energy efficiency. Meanwhile, the transition to a flatter V shape at the stern provides additional stability, ensuring the boat remains controlled at high speeds and in dynamic waters. The advantage of this design is the ability to move quickly with good stability, crucial for navigating complex navigation tasks and maneuvers in this competition.
In implementing these changes, we are aware that transportation is a crucial factor. Therefore, we designed a system that allows the boat to be easily disassembled and reassembled without compromising reliability and safety. This includes an efficient assembly strategy and lightweight yet robust materials to ensure the boat can be easily transported to the competition location.
Aligned with these changes, the team remains committed to conducting tests and simulations to validate the effectiveness of the design changes. This includes testing in various weather conditions and wave simulations to ensure the boat can perform optimally and safely in every situation.
Thus, these design changes are not only a response to the evaluation from the previous year but also a representation of our commitment to continually improve our boat. All these steps of change are undertaken with the primary goal of enhancing the endurance, safety, and performance of the boat, creating a more reliable and efficient platform to face the challenges of the International Roboboat Competition (IRC) this year.
In enhancing the safety factor of the electrical system on our boat, the technical team has implemented a series of initiatives focused on refining the boat's electrical infrastructure. Firstly, there has been a systematic reorganization of component cables, employing a more orderly and systematic method to reduce the potential for chaos and minimize the risk of disturbances. Subsequently, we have integrated a specially designed air cooling system to maintain the optimal temperature of electrical components, mitigating the potential for overheating that could adversely affect system performance and integrity. The utilization of larger component boxes is an integral part of our security strategy, providing additional protection to sensitive elements from external environmental factors and ensuring system reliability.
Thus, these design changes are not only a response to the evaluation from the previous year but also a representation of our commitment to continually improve our boat. All these steps of change are undertaken with the primary goal of enhancing the endurance, safety, and performance of the boat, creating a more reliable and efficient platform to face the challenges of the International Roboboat Competition (IRC) this year.
The meticulous design of component boxes aims to guarantee the tightness of cable openings, preventing the ingress of water and other external elements that could compromise component integrity. These measures are directed towards bolstering system resilience against diverse environmental conditions and preserving the integrity of critical components. Overall, the electrical safety initiatives we have implemented underscore the team's commitment to achieving safety standards and ensuring the boat's operational reliability in various environmental conditions.
In the course of developing the boat designed to compete this year, holistic improvements and enhancements have become the primary focus of the development team. Through an evaluation of the experiences from the previous year, our team identified several aspects, specifically the hardware performance and programming of the boat, which directly impact responsiveness, security, and overall performance in competition conditions.
In the previous year, the use of the Raspberry Pi 4 device for our boat's programming encountered challenges that significantly affected the system's performance. One major limitation was the low frames per second (FPS) level in the object detection process. This limitation stemmed from the relatively low hardware specifications and the object detection architecture requiring higher computational resources to operate efficiently.
In addressing this challenge, we decided to transition to the Jetson Nano device this year. This decision was based on several considerations, primarily related to performance improvement and reliability in executing object detection tasks. Jetson Nano offers the advantage of higher FPS due to its advanced hardware and optimized object detection architecture. We enhanced the boat's performance by adopting the TensorRT object detection algorithm, replacing Tensorflow-lite. This choice was made for significant improvements in both FPS and accuracy. TensorRT, with NVIDIA GPU optimization, provides higher processing speed, thereby enhancing the boat's responsiveness.
The embedded hardware in Jetson Nano boasts higher specifications, including a more powerful processor and an integrated GPU that enables faster data processing. This directly contributes to the increased FPS in the object detection process, overcoming constraints encountered with the previous device. This high processing speed is crucial in the context of boat competitions where quick responses to the surrounding environment are paramount.
Furthermore, the well-integrated object detection architecture on Jetson Nano provides more optimal support. This optimized design allows the object detection algorithm to run efficiently without overburdening resources. Consequently, we can execute object detection tasks with high accuracy without sacrificing overall performance.
By adopting the Jetson Nano device, our team aims to overcome the low FPS constraints faced in the previous year and significantly improve system performance. Speed and accuracy in the object detection process are considered critical aspects in responding to and adapting to the surrounding environment. With a choice of more sophisticated and optimized hardware, we are confident that our boat's programming will achieve higher performance levels in facing the challenging competition this year.

