ABOUT INTERNATIONAL ROBOBOAT COMPETITION
MANDAKINI HYDRA
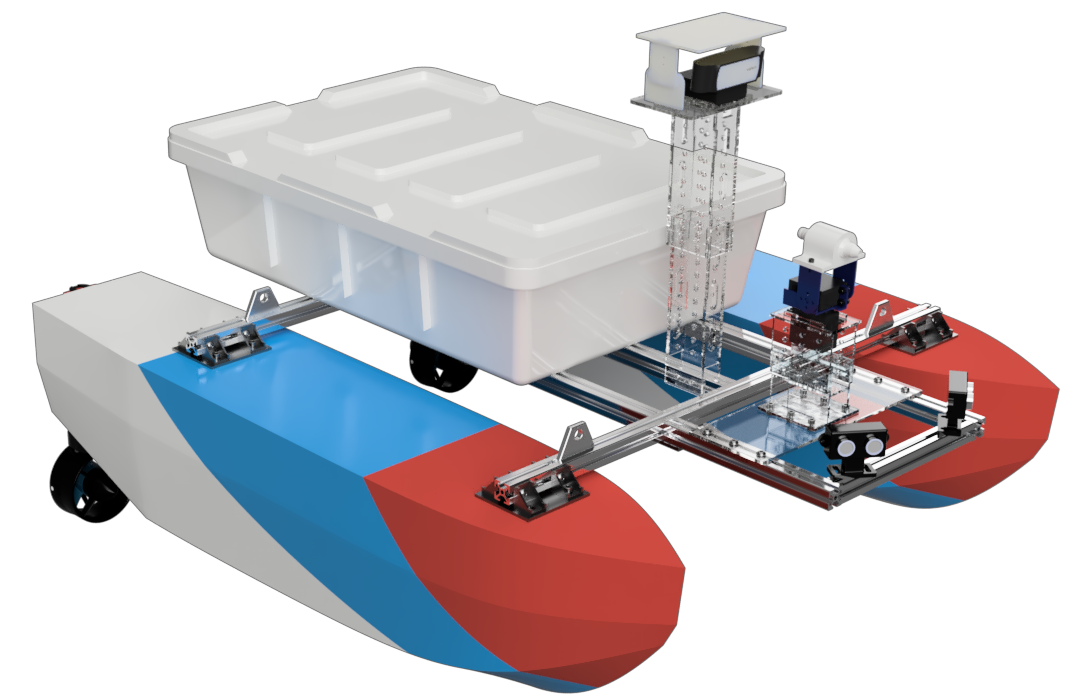
Mandakini Hydra is the fourth boat of the Bengawan UV Roboboat team. This boat is a development from the previous boat, Mandakini Catra. The development carried out is in the form of changes in the width of the boat and the height of the hull, as well as changes in the shape of the hull of the ship. The last created program was developed again by increasing the FPS that had been used before. There are also developments in the use of navigation systems, propulsion systems, and object detection. All developments carried out are expected to be the right steps for Roboboat Team to be able to advance even more in the future.
TECHNICAL DESIGN REPORT
TEAM INTRODUCTION VIDEO
DEVELOPMENT TIMELINE

Mandakini Hydra is designed using Maxsurf Modeler and SolidWorks software. The hull is designed differently from previous ships that use Symmetric V-Hull to become Modified V-Hull so as to make the boat more stable and reduce drag. This hull is made using plywood molds and then coated with fiberglass and gelcoat with a better composition than before so that the hull can be lighter but still sturdy.
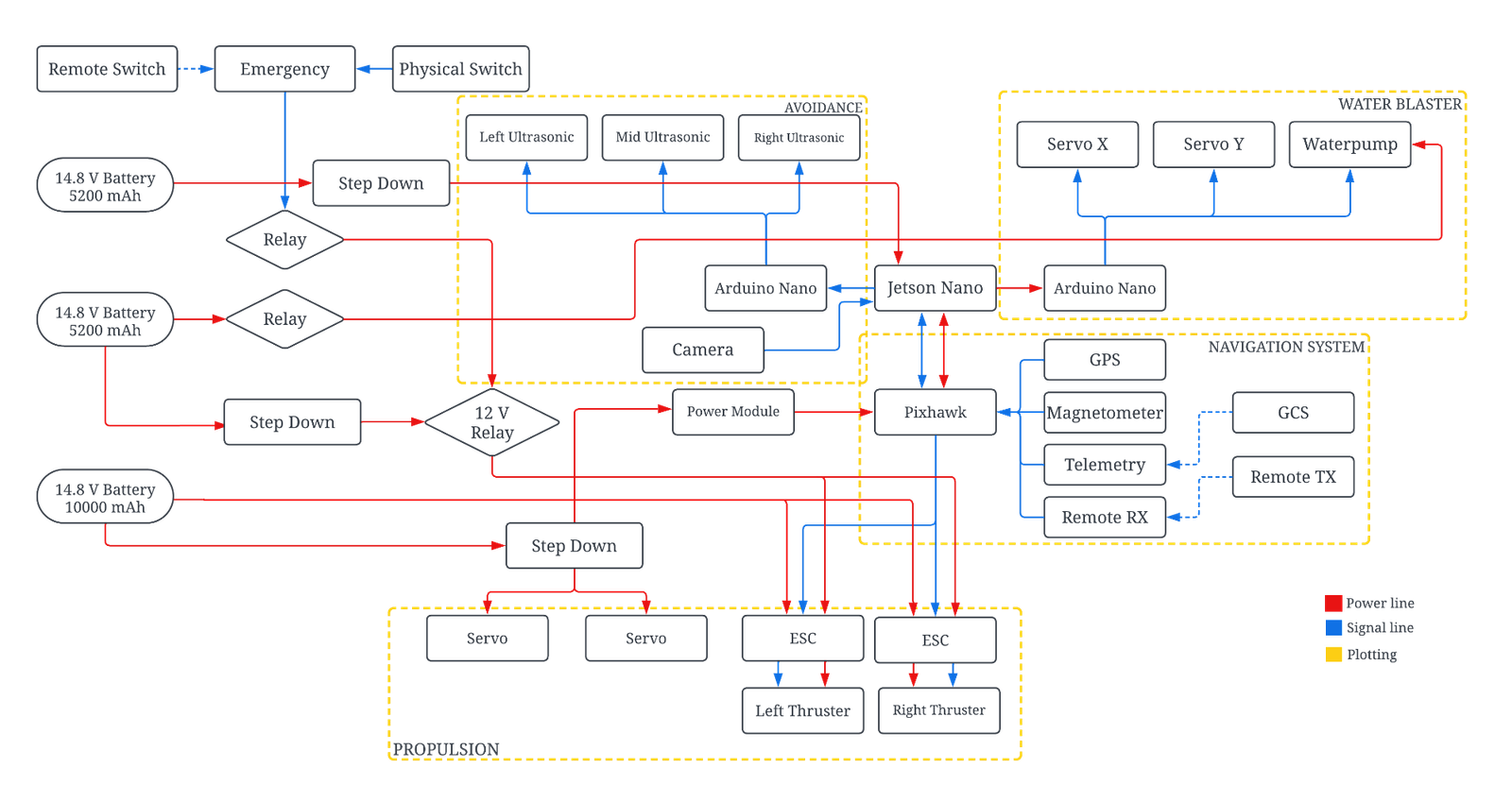
Mandakini Hydra is equipped with a different electrical system than before. The use of Jetson as a replacement for the Raspberry Pi makes the Mandakini Hydra boat can further improve performance in detection objects. In addition, the team also developed a navigation system on the boat using a Pixhawk cube and different GPS so that the boat was able to go to the waypoint with a higher level of accuracy compared to previous ship.
SIMULATION
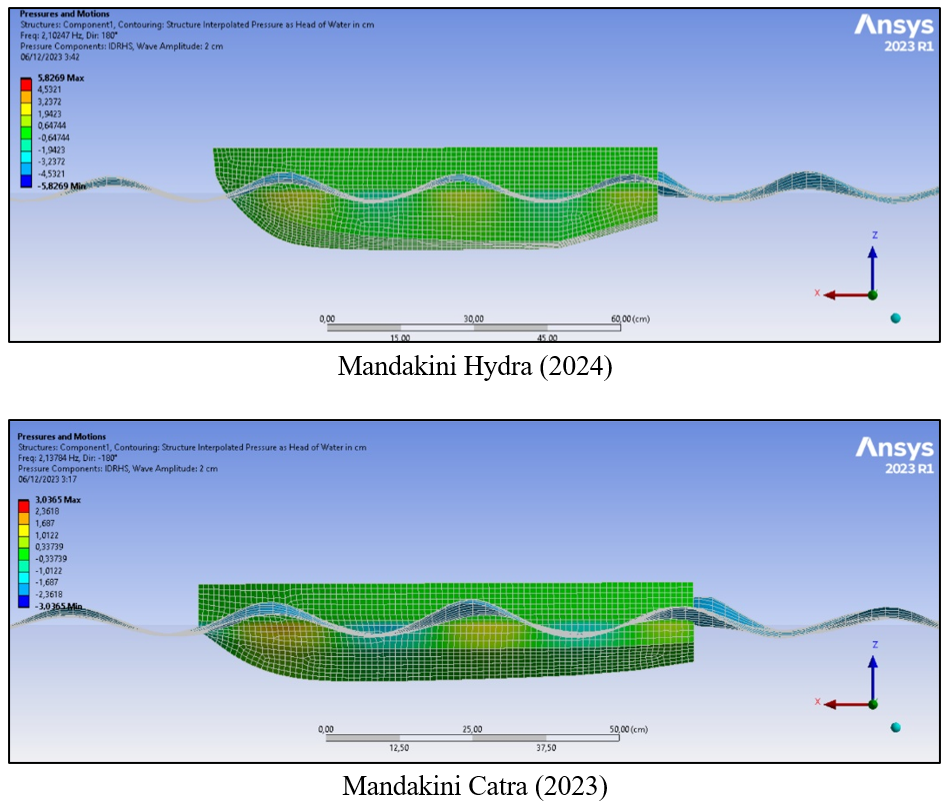
Mandakini Hydra hull has been analysed using ANSYS and Maxsurf software. The team conducted a stability and Operator Amplitude Response (RAO) test aimed at analyzing the ship's ability to return to the equilibrium point as well as the ship's motion response to water wave dynamics. Analysis results show that Mandakini Hydra has advantages in terms of stability compared to Mandakini Catra. With a turning degree of 30° and a maximum GZ value of 8.29 cm, Mandakini Hydra is more stable than the previous boat which only had a turning degree of 28.5° and a maximum GZ value of 6.18 cm under the same simulation conditions.
EXPERIMENT
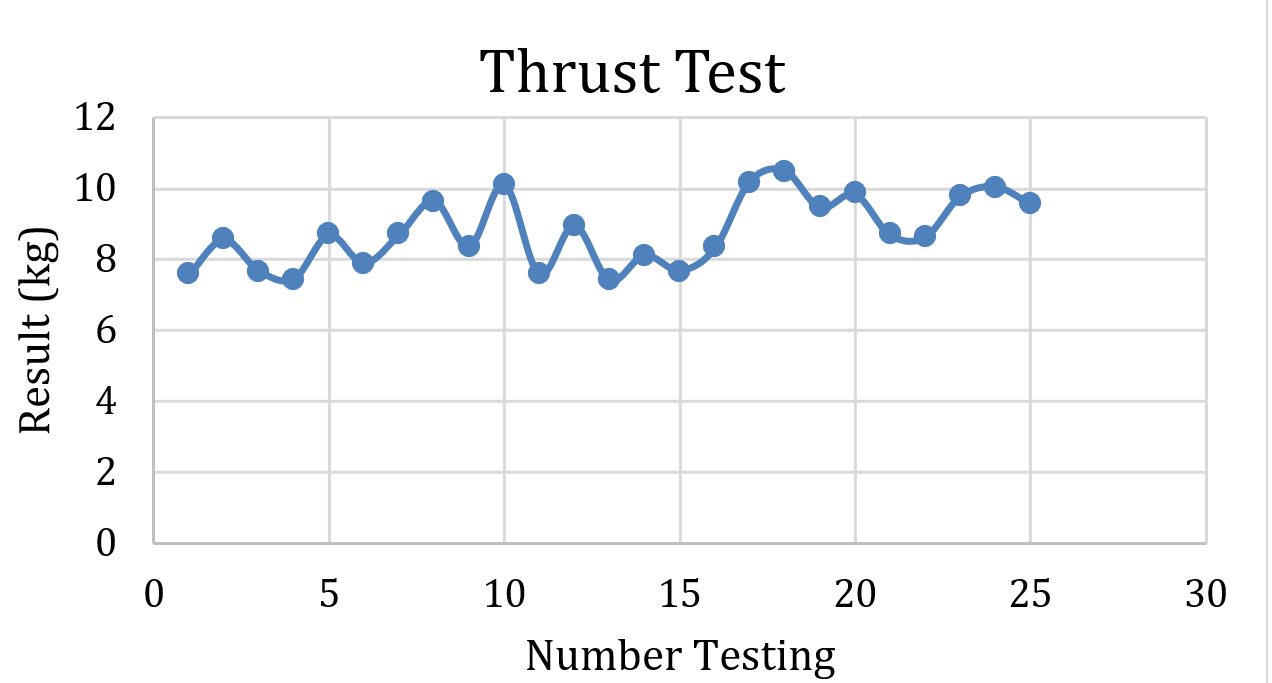
In testing the propulsion system, the team tested the strength of the ship's thrust force to push the load of the 10.5 kg boat using the T200 Blue Robotics Thruster and also the maneuverability of the boat when running overhead the water. This test was conducted in the lake.
Water blaster testing was carried out directly on the lake. Water blaster nozzles are placed about 1 meter away from the target. The test results showed that the water blaster was able to shoot water up to a distance of 2 meters at an angle of 45° from the surface of the water. After that, water is shot at the targeted duck object. The direction of the water from the nozzles will adjust the object read with the help of servos.

Mandakini Hydra uses an object detection algorithm with TensorRT on the Jetson Nano device. The highest average FPS result was achieved by the TRT architecture model mobilenet_v2 which had an FPS of 42 and an mAP of 37.5%. This result increased 4.52 times from the previous year using the TensorFlow Lite architecture model and only got an FPS of 7.6 and an mAP of 25.69%.

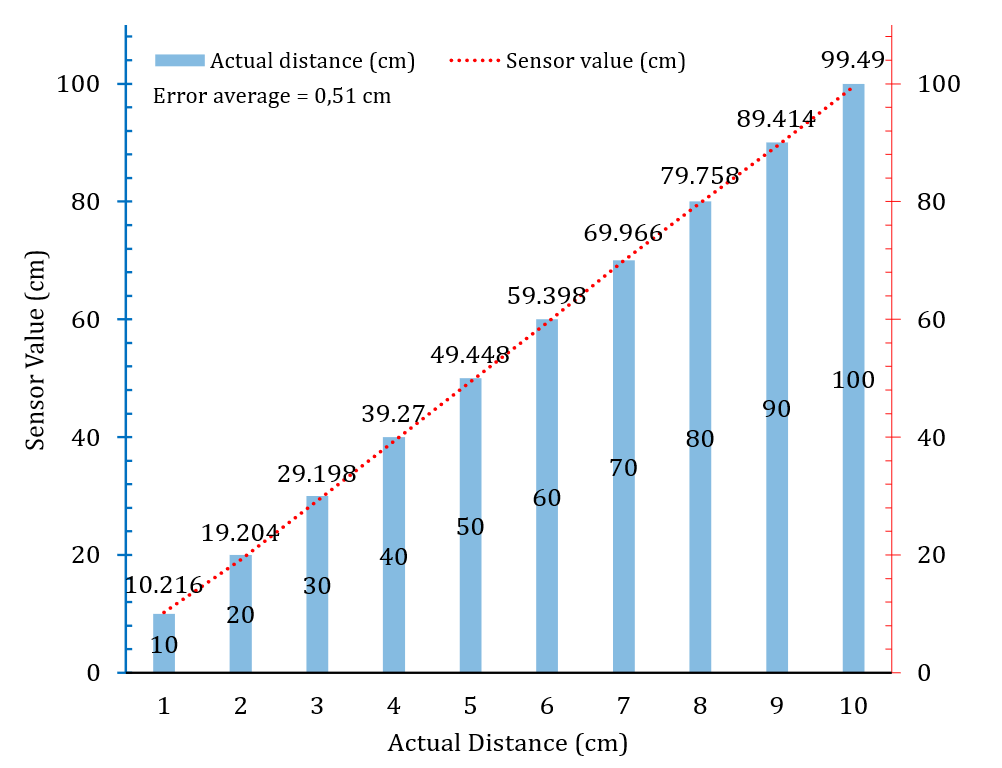
Sensor testing is carried out by comparing theultrasonic distance on the object with the actual distance, the test is carried out 5 times with 10 different distance variations from 10 cm to 100 cm with an interval of 10 cm. The test results that have been carried out are that there is an average value difference of 0.51 cm from the original distance.