
RoboBoat is an international student competition to design autonomous robotic boats. The robotic boat completes the challenge provided with impressive maritime maneuverability. Roboboat events are held once a year in america. 2021 is the first time Bengawan UV Team participated in the Roboboat competition
For More Information
The body was built for a week, starting from converting the 3D design to 2D to entering the lasser cutting process. The material used is plywood with a thickness of 3mm. After lasser cutting, the next process is to assemble the plywood pieces into a ship shape using G glue. After all, the body caulking is done, this is to cover the existing gaps and prevent leakage. After that, the next process is sanding to get a smooth surface. After that, the surfacer was given to the body so that the body was more waterproof.
After the body parts have been made, the next step is to install the electronic components and the sensors used. The components used include: Pixhawk, Arduino, relay, ESC, Ultrasonic sensor, camera, laprop and other propulsion components.

Ship testing is carried out to test whether the sensors and electronic systems on the ship are running well to complete the mission.
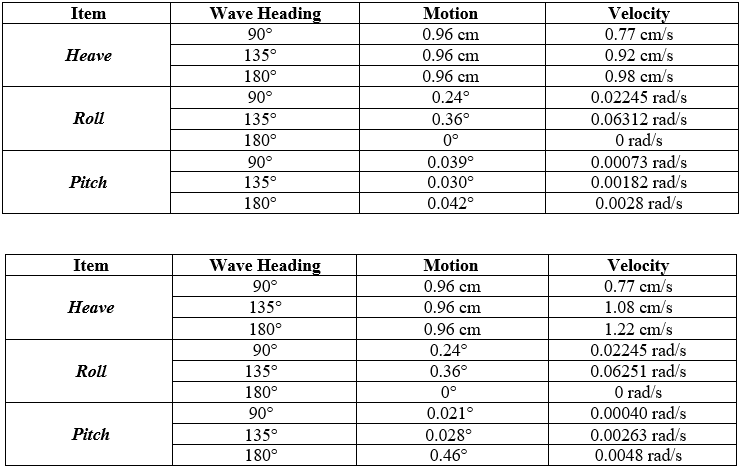
In the aspect of the seakeeping test, this ship is required to have the ability to maintain its stability in choppy water conditions properly. This test is conducted to meet IMO standards which limit the movement of ships due to waves that can cause motion sickness incidence. This test aims to maintain the position of the components attached to the ship such as sensors, GPS, cameras and other electrical components so that there is no change in position that causes malfunctions in the prototype system that can derail the mission on the trajectory due to the current waves on the water surface. In this research, a seakeeping test was carried out at a speed of 5 knots and 10 knots. The following is the data from the test results of the Mandakini Neo prototype ship maneuvering
After conducting several tests on the Mandakini Neo ship design, this ship design has a fairly small resistance value. The advantages of ships with small obstacles are that they can move forward and have good maneuverability, this is the strength of the ship in making it easier to maneuver to complete the mission. Basically, these obstacles are not only caused by external factors such as fluid and air. But it is also caused by various factors such as the designer's ability to select and create a model so that it is able to produce the smallest possible resistance.

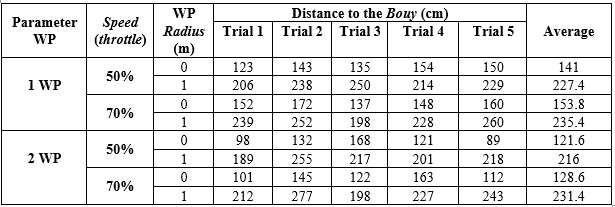
The first experiment was to test the accuracy of the GPS in real life. The test was carried out using 1 waypoint and 2 waypoints with several additional parameters, namely speed and waypoint radius.
For more details click link below
learn moreWe did several tests by changing and combining the 3 test parameters that have been mentioned to get the best results for the reality of the ship's distance with the predetermined waypoints. The following is the data from the M8N GPS sensor test for the Mandakini Neo ship
GPS sensor testing is done by comparing the use of a combination of parameters in running the ship automatically. The best average is obtained when using the 2 waypoint parameter with a speed throttle of 50% and a waypoint radius of 0 m, which is 121.6 cm with a specified waypoint distance and the worst results are using the 1 waypoint parameter with a speed throttle of 70% and a waypoint radius of 1 m. From all the data obtained, it can be concluded that the more waypoints the accuracy of the gps will be because the path to be traversed is clearer in direction than we use fewer waypoints, the smaller the speed and the smaller the waypoint radius, the better the gps accuracy will be due to the larger the waypoint. radius, the greater the range that can be reached by the GPS so that the waypoint distance determined by the vehicle will be even further away. the best results in this trial will be applied to the use of each mission that will be carried out
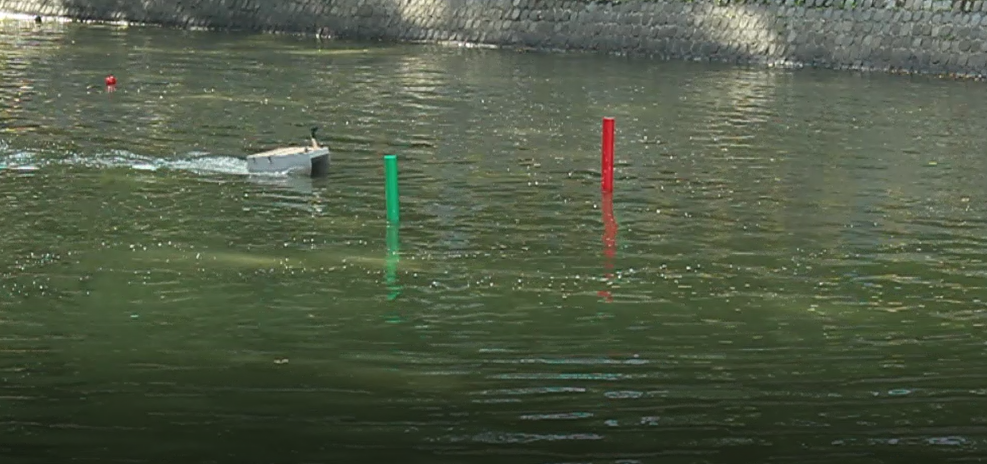
This sensor testing aims to test whether the object avoidance system is successful or not to avoid obstacles such as poles and buoys
For more details click link below
learn moreIn testing the ultrasonic sensor HC-SR04 using two ultrasonic sensors and installed at an angle of 30 ° from the front side of the ship. The reason we use two ultrasounds is because the mission we are on is to simply use two as object avoidance. This test is done by comparing two parameters, namely the turning angle of the servo and also the trigger distance which is done manually in moving the ship to the object to be hit. When the predetermined parameters are met, the ship will move to avoid the object. The following is the test data of the HC-SR04 ultrasonic sensor on the Mandakini Neo ship

At first we compared vessels without ultrasonic and vessels using ultrasonic. It can be seen that the ship with ultrasonic can avoid objects from crashing. However, it is necessary to optimize the ultrasonic sensor so that the avoidance system can be maximized. The success parameter of this experiment is if the ship can avoid an obstacle without touching it at all. Experiments were carried out at a speed of 50% of maximum throttle. Our first experiment conducted a test with a parameter of 30 ° turning angle and a trigger distance of 80 cm. The second is the turning angle of 30 °, the trigger distance is 100 cm. The third is the turning angle of 45 °, the trigger distance is 80 cm. The four corners of 45 turn 100. Based on the test results, there are two types of parameters that have success as much as 80%. However, we chose to use the parameter type turning angle of 30 ° and trigger distance of 100 cm. this is because the ship will be more stable and safer when avoiding objects of obstruction and then continue.