| 09/23/24 – 09/28/24 |
1. Object Detection Algorithm Decision
2. FPS and mAP Checking
3. Simulation of Stability, RAO, and Resistance using ANSYS Aqwa and ANSYS Fluent
|
Obtained the YOLOv4 algorithm with 64.94 mAP and achieved results in stability, RAO, and resistance.
|
Bengawan UV Workshop |
| 08/01/24 – 08/05/24 |
1. Buoyancy test
2. Propulsion test
3. Maneuver test
|
Mandakini Zenith can float safely, the propulsion generates a thrust of 13 kg, and the vessel can maneuver well.
|
Universitas Sebelas Maret Lake Facility |
| 08/07/24 – 08/12/24 |
1. Navigation system simulation testing
2. PID Simulation
|
Obtained the PID values to be used for Mandakini Zenith. |
Bengawan UV Workshop |
| 08/14/24 – 08/19/24 |
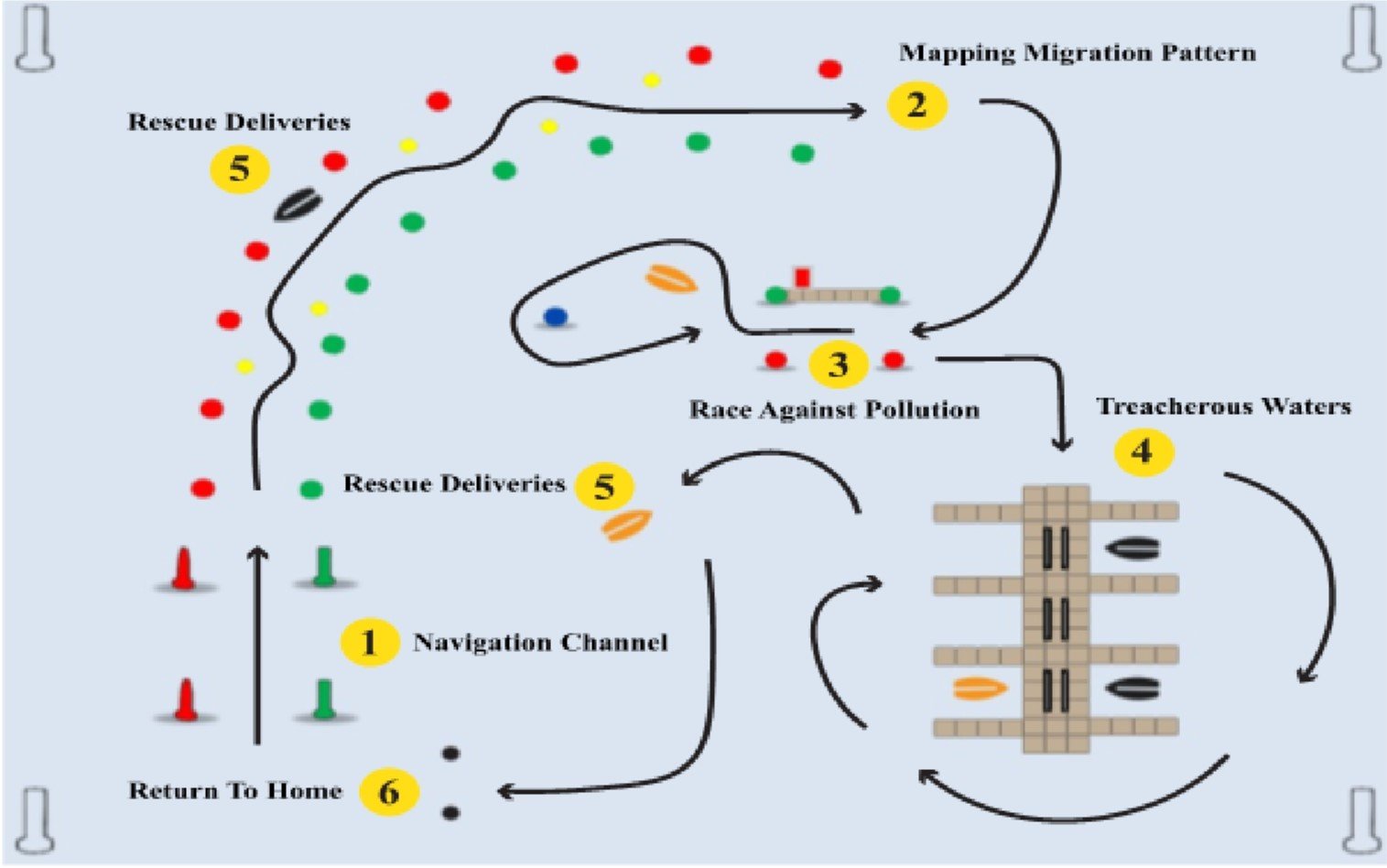
Navigation Channel and Mapping migration patterns mission testing
|
1. The program implemented on Mandakini successfully executed motion commands during the Navigation Channel mission.
2. Mandakini Zenith effectively detected ball obstacles and completed Mapping migration patterns mission.
|
Bengawan UV Workshop |
| 08/28/24 – 11/02/24 |
LiDAR testing for treacherous waters mission |
Mandakini Zenith is able to measure the distance to the docking area with precision. |
Bengawan UV Workshop |
| 11/04/24 – 11/16/24 |
Treacherous waters mission testing |
Mandakini Zenith entered the right docking area with precision. |
Universitas Sebelas Maret Lake Facility |
| 11/18/24 – 11/23/24 |
1. Testing the X-axis camera servo mechanism.
2. Simulation of Race against pollution mission
|
1. The camera servo can move to assist the camera in monitoring the light panel located beside the vessel.
2. The object detection system can accurately detect the light panel and black buoys.
|
Bengawan UV Workshop |
| 11/25/24 – 12/07/24 |
Race against pollution mission testing |
1. Mandakini Zenith is able to stop at the holding bay and move when the light panel turns green.
2. Mandakini Zenith is capable of navigating around the blue buoy and avoiding the black buoys.
|
Universitas Sebelas Maret Lake Facility |
| 12/09/24 – 12/22/24 |
Testing object and water delivery mechanism and Rescue Deliveries mission testing |
Mandakini Zenith is capable of detecting the orange and black vessels and delivering water or a racquetball based on the detected vessel at a distance of approximately 2 meters.
|
Universitas Sebelas Maret Lake Facility |
| 01/06/25 – 01/18/25 |
Full mission testing and simulation |
Improving obstacle detection and PID variables is essential to ensure the mission runs optimally. |
Bengawan UV Workshop and Universitas Sebelas Maret Lake Facility |






.jpg)