Navigation System
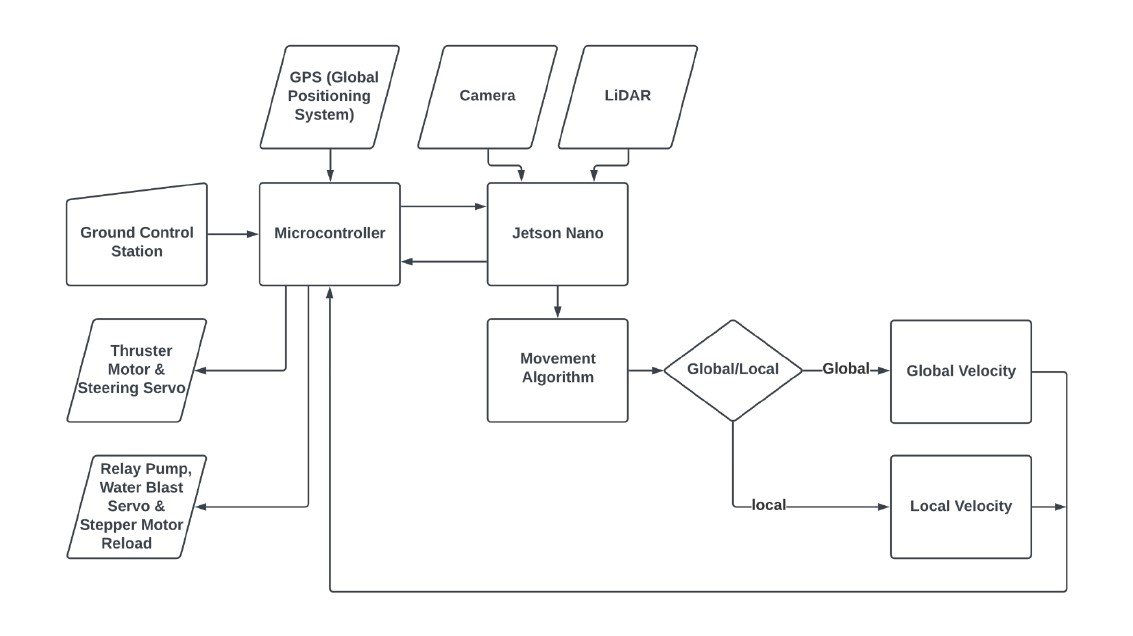
Mandakini Zenith is equipped with an advanced navigation system to ensure optimal performance in every mission. Before a mission begins, all sensors are activated and connected to the main computer system. Sensor data is processed in a mini PC, and the results are sent to a microcontroller responsible for controlling the ship's supporting components during the mission.
The ship's navigation uses waypoints to ensure smooth passage through the entry buoy gate. Additionally, four conditioning zones are employed to detect exit buoys, guide the ship, and prevent collisions. These conditioning zones adjust navigation based on the buoy's position relative to the ship, ensuring accurate direction even in changing conditions.
LiDAR acts as a key support in detecting objects when cameras face limitations. With this combination of technologies, Mandakini Zenith moves with precision, responsiveness, and reliability, successfully handling various missions even in challenging environments.